10月30日,在第二屆珠海國際靈巧操作挑戰賽決賽中,視源股份機器人團隊VibotPro攜毫米級“穿針引線”機械臂MAXHUB A3在生產賽道的比賽中以絕對優勢奪冠,成為賽事中唯一實現全自主完成所有任務的團隊。
本屆大賽由珠海市相關部門主辦,以“靈巧新生力,智匯創未來” 為主題,吸引了來自中國科學院自動化研究所、清華大學、香港大學、英國利物浦大學、浙江大學、NovaxRobotics(德國)等20余支海內外頂尖團隊同臺競技,是國內具身智能領域備受矚目的高水平、國際化賽事。

技術制勝,絕對優勢奪冠
本次賽事堅持以“用”為導向設置賽道,機器人靈巧操作不只是單純演示,而是被放到真實生產與生活場景中,首創 “生產+生活”雙賽道模式。生產賽道瞄準“工業裝配”的典型應用場景,在有限時長與有限工作空間條件下進行,重點考察機器人系統對多種(類)工件的識別與抓取、精準對齊與精細操作等核心作業能力,通過系統支持裝配流程的快速重構,以完成具備自主智能、穩定性好且柔性強的新型智能制造系統的設計,實現不同種類零部件的靈活組裝。
視源股份機器人團隊VibotPro在當天的比賽中,使用自研的MAXHUB A3智能柔性機械臂,僅用時12分16秒就一次性完成生產賽道設置的3項固定任務,以最快速度奪冠,且是全場唯一所有任務全自主完成的團隊,體現了MAXHUB A3優越的執行精度和交互能力,能很好地支撐工業裝配應用的研發和落地。

這3項任務有多難,我們具體看一下:
以“有限空間抓取任務”為例,機器人需要從365 mm × 245 mm× 63mm零件儲物箱中取出32mm長4mm粗的開口插銷、40.3mm長16mm粗的螺栓以及柔性線束并放置到工作臺上指定顏色區域內;在“剛性部件裝配任務”中,機器人需要將螺栓擰進任務板的螺紋孔,以及將開口銷插入螺栓尾部銷孔。而“柔性線束插接任務”則要求機器人將柔性線束兩端的接口分別插入任務板的插孔/母座,并將線束固定在卡槽內。

此次賽事圍繞“生產+生活”場景,聚焦的“靈巧操作”正是行業當前的“卡脖子”難題,體現了中國機器人產業已不滿足于“行走”和“觀看”,而是向“靈巧干活”這一更高階的智能水平發起沖擊,標志著技術攻關進入深水區。而這次比賽任務重點考察了機器人對多類工件識別和定位、無碰穩定抓取和正確分類的能力、執行精準對準和柔順力控裝配的能力、對接插頭插接、柔性物體識別與操作等能力,是機器人在工業精密裝配場景中應具備的核心能力之一,有效推動具身智能技術從“炫技”走向“實用”。
引發關注,逐步落地應用
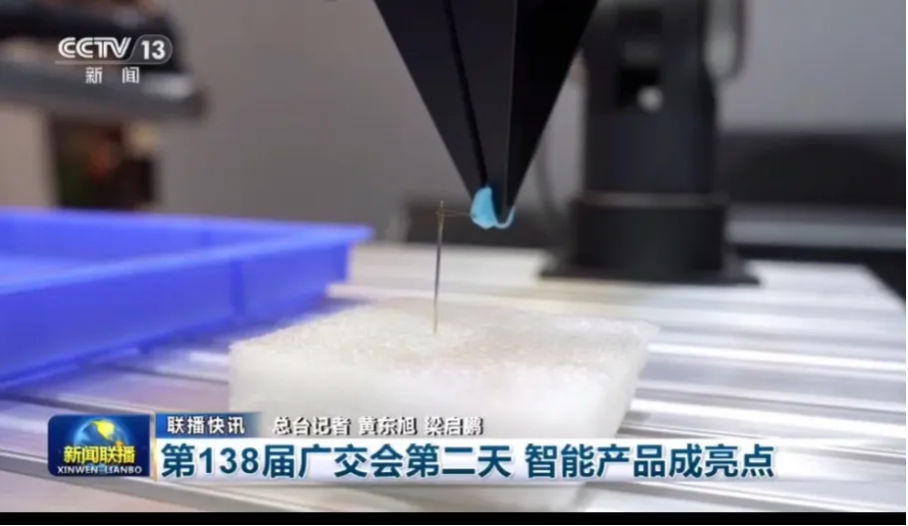
在剛剛結束的第138屆廣交會上,首次公開展示的MAXHUB A3智能柔性機械臂,通過“穿針引線”展示了機械臂本體的高精度性能及數據采集鏈路優越性,能夠支撐高精度裝配任務落地,引起了行業以及中央電視臺、新華社、人民日報等海內外媒體的持續關注,并三次登上新聞聯播節目。
同期視源股份還推出了全自研具身操作算法平臺,為機械臂的高性能表現提供了核心支撐。該平臺集成了多模態學習融合能力,支持模仿學習、真機強化學習與VLA大模型等多種具身智能方案,實現了從感知、決策到控制的一體化操作。
目前,MAXHUB A3智能柔性機械臂已在視源自有工廠中驗證其價值,以±0.1mm的定位精度和超過5m/s的運動速度高效作業。它不僅是比賽場上的冠軍,更是視源股份打通工業自動化“最后一公里”的利器。
從廣交會的首秀到珠海大賽的奪冠,這款智能柔性機械臂正一步步走向更廣闊的應用天地,在高端制造、職業教育和科研創新等領域大放異彩。

 返回
返回
